Signals and systems is a field of engineering and applied mathematics that deals with the analysis, representation, and processing of signals. In the study of signals and systems, various types of signals are analyzed and characterized in terms of their properties and behavior. These signals can be continuous-time signals, such as sinusoidal waves, or discrete-time signals, such as sequences of numbers. The behavior of these signals can be studied using techniques such as Fourier analysis and Laplace transforms, which allow us to represent signals in the frequency domain and understand their behavior over time.
A signal is a time-varying or spatially varying quantity that conveys information about a physical system or process. Examples of signals include audio signals, images, and electrical voltage or current signals.
Systems are mathematical models that describe the behavior of physical systems or processes. Systems are models that describe how signals are transformed or processed. These systems can be linear or nonlinear, and they can be time-invariant or time-varying. The study of signals and systems involves the use of mathematical techniques to analyze and manipulate signals and to understand how they interact with systems. This can include techniques such as Fourier analysis, Laplace transforms, and filtering.
Applications of signals and systems include audio and image processing, control systems, communication systems, biomedical engineering, radio and television broadcasting.
Some of the topics covered in subject Signals and Systems are:
Continuous-time signals and their properties, such as periodicity, frequency, and amplitude
Discrete-time signals and their properties, such as periodicity, frequency, and amplitude
Techniques for representing signals in the frequency domain, such as Fourier analysis and Laplace transforms
Linear time-invariant systems and their properties, such as impulse response and transfer function
Nonlinear and time-varying systems and their behavior
Techniques for analyzing and designing systems, such as convolution, frequency response, and stability analysis
Applications of signals and systems in communication systems, such as modulation and demodulation, error correction, and channel coding
Applications of signals and systems in control systems, such as feedback control and stability analysis
Overall, the study of signals and systems in electronics and communication engineering is important because it provides a foundation for understanding how signals are processed and how systems can be designed to perform specific functions on signals. This knowledge is essential for the design and analysis of many different types of electronic and communication systems.
Classification of Signals
There are several ways to classify signals and the specific classification scheme used may depend on the context and the goals of the analysis. Some common ways to classify signals include:
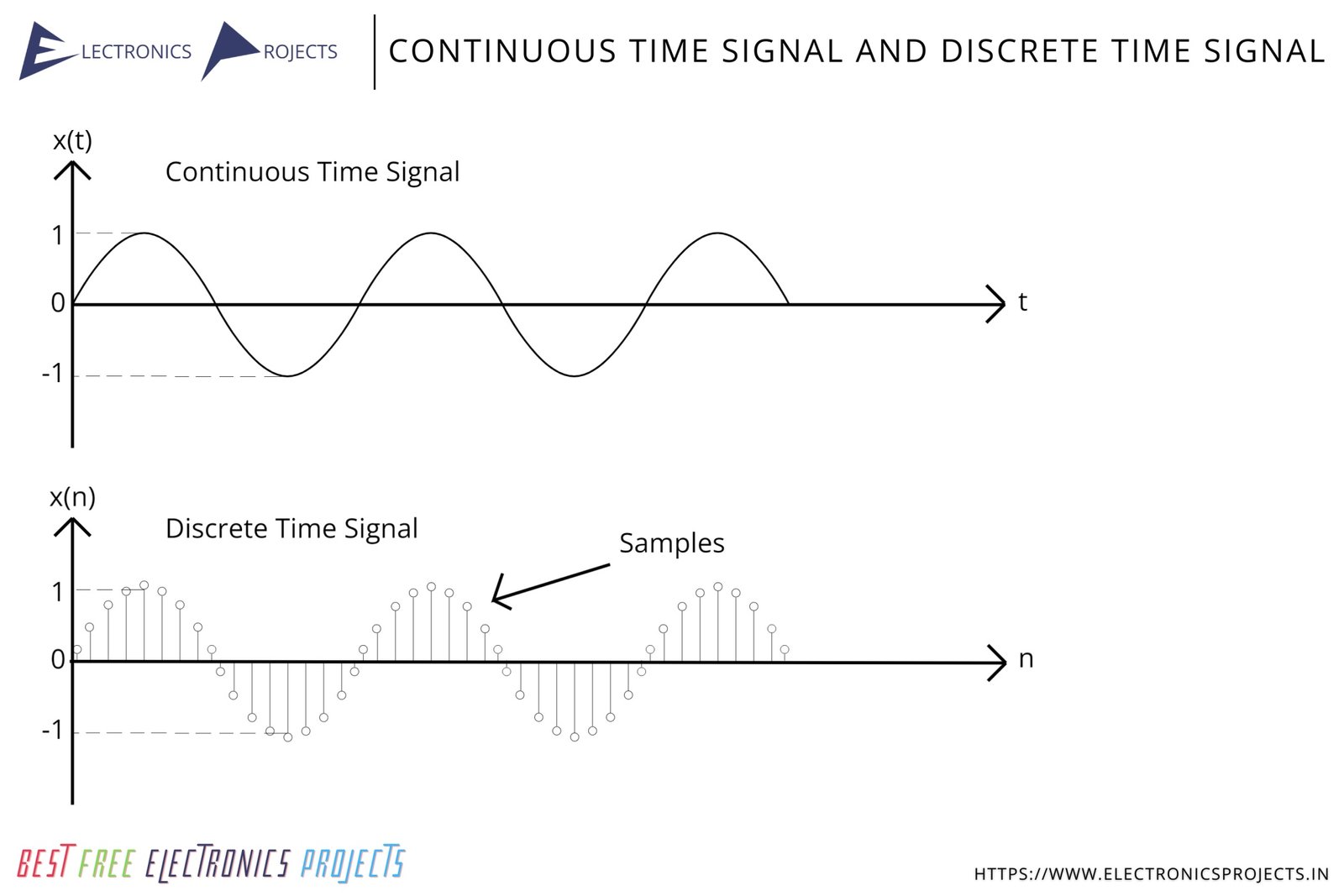
1. Continuous Time Signal and Discrete Time Signal.
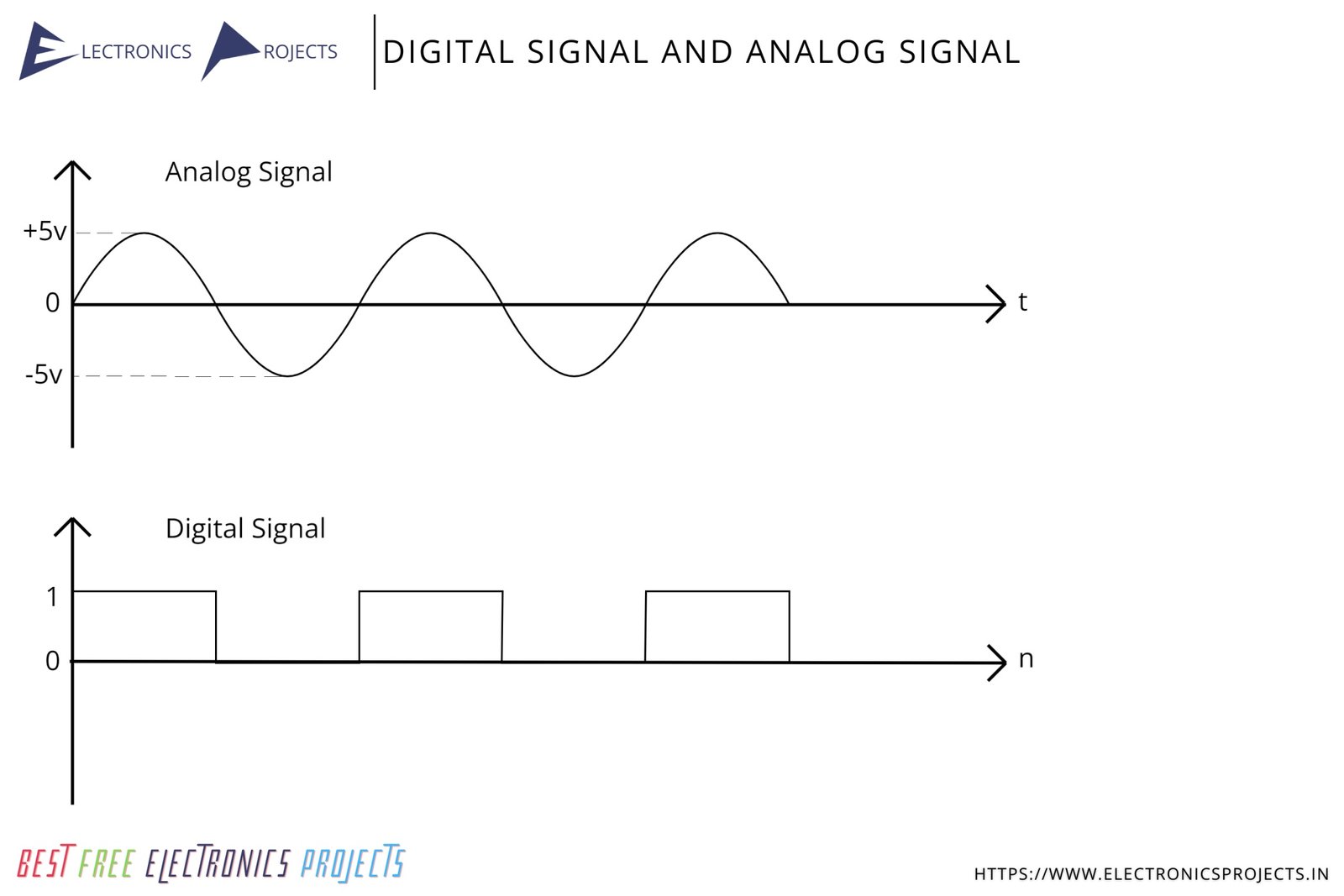
2. Analog Signal and Digital Signal.
3. Periodic Signal and Non-periodic (Aperiodic) Signal.
4. Deterministic Signal and Random Signal.
5. Energy Signal and Power Signal.
Classification of Systems
There are several ways to classify systems and the specific classification scheme used may depend on the context and the goals of the analysis. Some common ways to classify systems include:
1. Causal and Non-Causal System.
2. Invertible and Non-Invertible System.
3. Linear and Non-Linear System.
4. Stable and Unstable System.
5. Static and Dynamic System.
6. Time Variant and Time Invariant System.
SIGNALS:
1. Continuous Time Signal and Discrete Time Signal:
Difference between Continuous Time Signal and Discrete Time Signal:
SR. NO.
PARAMETER
CONTINUOUS TIME SIGNAL
DISCRETE TIME SIGNAL
1
Definition
Continuous time signals are functions of a continuous variable, such as time.
Discrete time signals are sequences of values that are defined at discrete, evenly spaced intervals of time.
2
Representation
Continuous time signals are typically represented using mathematical functions, such as sine or cosine waves.
Discrete time signals are usually represented using sequences of numbers.
3
Analysis
Continuous time signals can be analysed using continuous time domain techniques, such as Laplace transforms and Fourier transforms.
Discrete time signals can be analysed using discrete time domain techniques, such as z-transforms and discrete Fourier transforms.
4
Frequency
Continuous time signals have a continuous frequency spectrum.
Discrete time signals have a discrete frequency spectrum.
5
Digital Signal Processing
Continuous time signals, on the other hand, require analog-to-digital conversion before they can be processed digitally.
Discrete time signals are used extensively in digital signal processing, as they can be easily processed by computers.
6
Storage
Continuous time signals, on the other hand, require more storage space and cannot be transmitted digitally without first being sampled and quantized.
Discrete time signals can be easily stored and transmitted digitally, as they are represented by a series of numbers.
7
Bandwidth
Continuous time signals have an infinite bandwidth.
Discrete time signals have a finite bandwidth.
8
Modulation
Continuous time signals can be modulated using analog techniques, such as amplitude, frequency, and phase modulation.
Discrete time signals are typically modulated using digital techniques, such as pulse code modulation (PCM) and quadrature amplitude modulation (QAM).
9
Noise
Continuous time signals are more susceptible to noise and interference, as they are transmitted over analog channels.
Discrete time signals are less susceptible to noise, as they are transmitted digitally.
10
Filtering
Filtering of continuous time signals is typically done using analog filters.
Filtering of discrete time signals is typically done using digital filters.
11
Stability
Continuous time systems can be analysed using stability criteria such as the Routh-Hurwitz stability criterion and the Nyquist stability criterion.
Discrete time systems can be analysed using stability criteria such as the Jury stability criterion and the Hurwitz stability criterion.
12
Causality
Continuous time systems can be either causal or non-causal.
Discrete time systems are always causal.
13
Time Delay
Continuous time systems can have an arbitrary time delay.
Discrete time systems have a fixed time delay of one sample period.
14
Mathematical Operations
Continuous time signals can be manipulated using continuous time domain mathematical operations, such as integration and differentiation.
Discrete time signals can be manipulated using discrete time domain mathematical operations, such as discrete integration and discrete differentiation.
2. Analog Signal and Digital Signal:
Difference between Analog Signal and Digital Signal:
SR. NO.
PARAMETER
ANALOG SIGNAL
DIGITAL SIGNAL
1
Explanation
An analog signal is a continuous representation of a physical quantity, such as voltage or current, that can vary over a range of values. Analog signals are typically used to transmit audio and video signals, and are transmitted as waves through electrical or electromagnetic means.
Digital signals, are discrete representations of data that can only take on a limited number of values. Digital signals are typically used to transmit data and are transmitted as pulses through electrical means. Digital signals are more resistant to noise and interference than analog signals, and are more easily processed and transmitted over long distances.
2
Continuity
Analog signals are continuous.
Digital signals are discrete.
3
Range of Values
Analog signals have an infinite number of possible values.
Digital signals have a limited number of values.
4
Noise and Distortion
Analog signals are prone to noise and distortion.
Digital signals are less affected by noise.
5
Distance
Analog signals are transmitted over long distances through electrical or electromagnetic means.
Digital signals are transmitted over shorter distances through electrical means.
6
Transmission Method
Analog signals are typically transmitted as waves.
Digital signals are transmitted as pulses.
7
Application
Analog signals are typically used for transmitting audio and video.
Digital signals are used for transmitting data.
8
Measurement and Analysis
Analog signals are easier to measure and analyse.
Digital signals require specialized equipment for measurement and analysis.
9
Accuracy
Analog signals are generally less accurate.
Digital signals are more accurate.
10
Security
Analog signals can be more easily intercepted and manipulated.
Digital signals are more secure.
11
Interference
Analog signals are generally more susceptible to interference.
Digital signals are less susceptible.
12
Efficiency
Analog signals are generally less efficient in terms of bandwidth and storage.
Digital signals are more efficient.
13
Environmental Factor
Analog signals can be affected by temperature and humidity.
Digital signals are not affected by these factors.
14
Process
Analog signals are generally more difficult to process.
Digital signals are easier to process and manipulate.
3. Periodic Signal and Non-Periodic Signal:
Difference between Periodic Signal and Non-Periodic Signal:
SR. NO.
PARAMETER
PERIODIC SIGNAL
NON-PERIODIC SIGNAL
1
Explanation
A periodic signal is a type of signal that repeats at regular intervals. Periodic signals are characterized by a constant frequency and may have a constant or varying amplitude.
Non-periodic signals, also known as aperiodic signals, do not repeat at regular intervals. Aperiodic signals may have varying frequencies and amplitudes, and may have complex or irregular waveforms.
2
Repetition
Periodic signals repeat at regular intervals.
Non-Periodic signals do not repeat.
3
Frequency
Periodic signals have a constant frequency.
Non-Periodic signals may have varying frequencies.
4
Amplitude
Periodic signals may have a constant or varying amplitude.
Non-Periodic signals may have a constant or varying amplitude.
5
Waveform
Periodic signals have a repeating waveform.
Non-Periodic signals may have a complex or irregular waveform.
6
Spectrum
Periodic signals have a discrete set of frequencies in their spectrum.
Non-Periodic signals may have a continuous spectrum.
7
Energy
Periodic signals have energy concentrated at specific frequencies.
Non-Periodic signals may have energy distributed over a range of frequencies.
8
Time Domain Representation
In the time domain, periodic signals appear as repeating waves.
Non-Periodic signals may appear as random or chaotic.
9
Fourier Transform
The Fourier transform of a periodic signal is a series of delta functions.
The Fourier transform of an Non-Periodic signal may be a continuous function.
10
Sampling
Periodic signals can be accurately represented by a finite number of samples.
Non-Periodic signals may require an infinite number of samples to be accurately represented.
11
Application
Periodic signals are commonly used in communication and control systems.
Non-Periodic signals are used in audio and image processing, and in the study of chaotic systems.
12
Example
Examples of periodic signals include sine waves, square waves, and triangle waves.
Examples of Non-Periodic signals include noise, music, and speech. Non-periodic signals are commonly used in audio and image processing, and in the study of chaotic systems.
4. Deterministic Signal and Random Signal:
Difference between Deterministic Signal and Random Signal:
SR. NO.
PARAMETER
DETERMINISTIC SIGNAL
RANDOM SIGNAL
1
Explanation
A deterministic signal is a signal that is completely determined and predictable. It follows a fixed pattern and can be accurately reproduced.
A random signal is a signal that does not follow a fixed pattern and is not predictable. It is characterized by a lack of order or regularity, and its values cannot be accurately reproduced.
2
Predictability
Deterministic signals are completely determined and predictable.
Random signals are not.
3
Pattern
Deterministic signals have a definite and fixed pattern.
Random signals are not.
4
Amplitude
Deterministic signals have a well-defined amplitude.
Random signals are not.
5
Phase
Deterministic signals have a well-defined phase.
Random signals are not.
6
Frequency
Deterministic signals have a well-defined frequency.
Random signals are not.
7
Period
Deterministic signals have a well-defined period.
Random signals are not.
8
Wavelength
Deterministic signals have a well-defined wavelength.
Random signals are not.
9
Duty Cycle
Deterministic signals have a well-defined duty cycle.
Random signals are not.
10
Pulse Width
Deterministic signals have a well-defined pulse width.
Random signals are not.
11
Rise Time
Deterministic signals have a well-defined rise time
Random signals are not.
12
Fall Time
Deterministic signals have a well-defined fall time.
Random signals are not.
13
Accuracy
Deterministic signals can be accurately reproduced.
Random signals are not.
14
Example
Examples of deterministic signals include sinusoidal signals, square waves, and triangular waves.
Examples of random signals include white noise and certain types of communication signals. Random signals are often used in statistical analysis and probability theory to model processes that exhibit random behaviour.
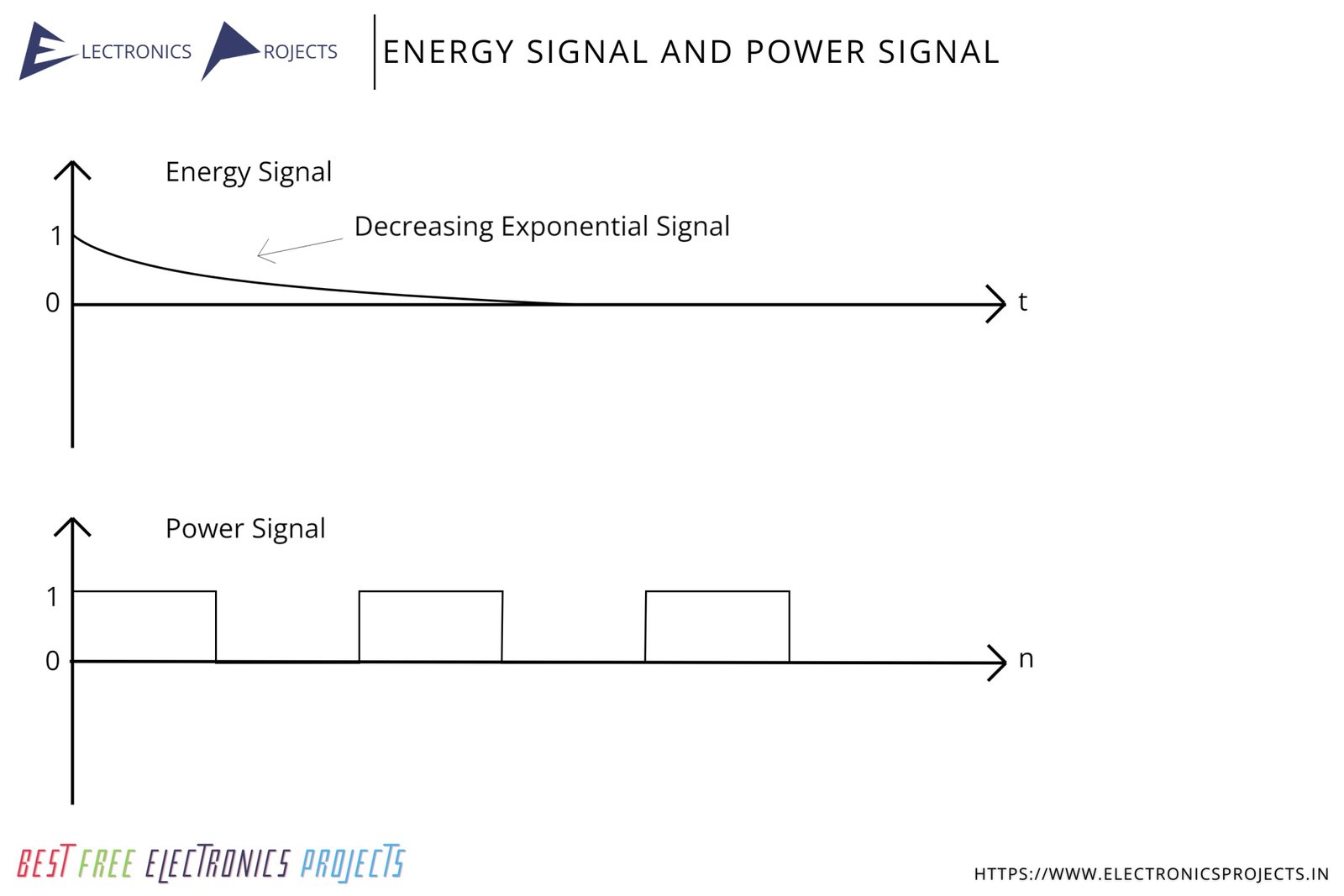
5. Energy Signal and Power Signal:
Difference between Energy Signal and Power Signal:
SR. NO.
PARAMETER
ENERGY SIGNAL
POWER SIGNAL
1
Explanation
Energy signal is a measure of total energy contained in a signal.
Power signal is a measure of the rate at which energy is transmitted or used.
2
Representation
Energy represents the capacity to do work.
Power represents the rate at which the work is done.
3
Quantity Type
It is a scaler quantity.
It is a vector a quantity.
4
Type
It can be positive or negative.
It is always positive.
5
Energy/Power
Energy Signals have no power. (Power=0)
Power Signals have infinite energy. (Energy=∞)
6
Signal Type
Energy signals are non-periodic.
Power signals are periodic.
7
Example
Exponential Signal.
Sinusoidal or Square Wave signal.
SYSTEMS:
1. Causal and Non-Causal System:
SR. NO.
PARAMETER
CAUSAL SYSTEM
NON-CAUSAL SYSTEM
1
Explanation
In a causal system, the output of the system depends directly on the current and past inputs to the system. In other words, the output of a causal system is determined by the input events that precede it in time.
A non-causal system is one in which the output does not depend solely on the current and past inputs. Instead, the output of a non-causal system may depend on future inputs as well.
2
Output Response
Causal system produces output only in response to input that has occurred in the past or is currently happening.
A non-causal system may produce output in response to input that has not yet occurred.
3
Output
The output of a causal system depends only on the past and present values of its input.
The output of a non-causal system may depend on future values of its input as well.
4
Impulse Response and Energy
A causal system has a finite impulse response (FIR) and a finite energy output.
A non-causal system may have an infinite impulse response (IIR) and an infinite energy output.
5
Future Knowledge
A causal system does not exhibit advance knowledge of future input.
A non-causal system may exhibit such knowledge.
6
Feedback and Looping
A causal system does not exhibit feedback or looping behaviour.
A non-causal system may exhibit feedback or looping behaviour.
7
Frequency Response
The frequency response of a causal system is always symmetrical around the origin.
The frequency response of a non-causal system may be asymmetrical.
8
Transfer Function
The transfer function of a causal system is always stable.
The transfer function of a non-causal system may be unstable.
9
Poles
The poles of a causal system’s transfer function are always located in the left half of the complex plane.
The poles of a non-causal system’s transfer function may be located in either the left or right half of the complex plane.
10
Group Delay
A causal system has a finite group delay.
A non-causal system may have an infinite group delay.
11
Time Domain Response
The time domain response of a causal system is always limited to the interval (0,∞).
The time domain response of a non-causal system may extend to negative time values.
12
Frequency Domain Representation
The frequency domain representation of a causal system is always limited to the interval (0,∞).
The frequency domain representation of a non-causal system may extend to negative frequencies.
13
Time Variant/Invariant
A causal system is always time-invariant.
A non-causal system may be time-variant.
14
Memory
A causal system is always memoryless.
A non-causal system may have memory.
15
Input-Output Relationship
A causal system always exhibits a fixed input-output relationship.
A non-causal system may exhibit a probabilistic or indeterministic input-output relationship.
16
Linearity
A causal system is always linear.
A non-causal system may be nonlinear.
2. Invertible and Non-Invertible System:
SR. NO.
PARAMETER
INVERTIBLE SYSTEM
NON-INVERTIBLE SYSTEM
1
Explanation
Invertible systems are systems that have a one-to-one relationship between the input and output signals. This means that for any given input signal, there is only one corresponding output signal. Invertible systems can be inverted to obtain the original input signal from the output signal.
Non-invertible systems are systems that do not have a one-to-one relationship between the input and output signals. This means that for a given input signal, there may be multiple corresponding output signals, or there may be no corresponding output signal at all. Non-invertible systems cannot be inverted to obtain the original input signal from the output signal.
2
Invertibility
An invertible system can be inverted to obtain the original input signal from the output signal.
A non-invertible system cannot.
3
Input-Output Relationship
An invertible system has a one-to-one relationship between the input and output signals.
A non-invertible system may have many-to-one or one-to-many relationships.
4
Stability
An invertible system is generally more stable than a non-invertible system.
A non-invertible system is less stable than invertible system.
5
Feedback
Invertible systems are typically used in feedback control systems.
Non-invertible systems are not.
6
Noise tolerance
Invertible systems are generally more tolerant of noise.
Non-invertible systems are not more tolerant of noise.
7
Frequency response
Frequency response is more predictable.
Frequency response is less predictable.
8
Transfer function
Transfer function is simple
Transfer function is not simple
9
Linearity
Invertible systems are more linear
Non-invertible systems are less linear
10
Time delay
An invertible system may have a time delay.
A non-invertible system generally does not.
11
Causality
An invertible system is generally causal.
A non-invertible system may be non-causal.
12
Input range
An invertible system may have a limited input range.
A non-invertible system may have a broader input range.
13
Output range
An invertible system may have a limited output range.
A non-invertible system may have a broader output range.
14
Dynamic range
The dynamic range of an invertible system is generally smaller than that of a non-invertible system.
The dynamic range of an non-invertible system is generally larger than that of a invertible system.
15
Memory
An invertible system may have memory.
A non-invertible system generally does not.
16
Robustness
An invertible system is generally more robust to changes in the input signal than a non-invertible system.
Non-invertible systems are less robust.
17
Example
Examples of invertible systems include linear time-invariant (LTI) systems and systems with a unique inverse.
Examples of non-invertible systems include non-linear systems and systems with multiple inputs and outputs.
3. Linear and Non-Linear System:
SR. NO.
PARAMETER
LINEAR SYSTEM
NON-LINEAR SYSTEM
1
Explanation
Linear systems follow the principle of superposition, meaning that the response of the system to any input signal is the sum of the responses to each individual component of the input signal.
Nonlinear systems do not follow the principle of superposition and the output of the system can be affected by the interaction of multiple input signals.
2
Proportionality
The response of a linear system is proportional to the input signal.
The response of a nonlinear system is not proportional to the input signal.
3
Input-Output Relationship
The input-output relationship of a linear system is described by a linear function.
The input-output relationship of a nonlinear system is described by a nonlinear function.
4
Coefficients
Linear systems have constant coefficients.
Nonlinear systems may have variable coefficients.
5
Additivity
The input-output relationship of a linear system is additive.
The input-output relationship of a nonlinear system may not be additive.
6
Homogeneity
The input-output relationship of a linear system is homogeneous, meaning that the output signal is a scaled version of the input signal.
The input-output relationship of a nonlinear system may not be homogeneous.
7
Stability
Linear systems are generally stable.
Nonlinear systems can be either stable or unstable.
8
Time Invariance
Linear systems are time-invariant, meaning that the response of the system to any input signal is independent of the time at which the input is applied.
Nonlinear systems may be time-varying, meaning that the response of the system to any input signal is dependent on the time at which the input is applied.
9
Boundedness
The response of a linear system to a bounded input signal is also bounded.
The response of a nonlinear system to a bounded input signal may not be bounded.
10
Linearity
Linear systems are linear 🙂
Nonlinear systems are nonlinear 🙂
4. Stable and Unstable System:
SR. NO.
PARAMETER
STABLE SYSTEM
UNSTABLE SYSTEM
1
Definition
A stable system is one that exhibits a bounded response to a bounded input.
An unstable system is one that exhibits an unbounded response to a bounded input.
2
Input-Output Relationship
A stable system has a well-defined input-output relationship.
An unstable system may have an undefined or erratic input-output relationship.
3
Output Range
A stable system generally has a limited output range.
An unstable system may have an unbounded output range.
4
System Behaviour
A stable system exhibits predictable behaviour.
An unstable system may exhibit unpredictable or erratic behaviour.
5
Frequency Response
The frequency response of a stable system is generally well-behaved.
An unstable system may be erratic or undefined.
6
Transfer Function
The transfer function of a stable system is generally well-defined.
An unstable system may be undefined or erratic.
7
Linearity
A stable system is generally more linear.
Less linear.
8
Time Delay
A stable system may have a time delay.
An unstable system generally does not.
9
Causality
A stable system is generally causal.
An unstable system may be non-causal.
10
Robustness
A stable system is generally more robust to changes in the input signal than an unstable system.
Less robust to changes in input signal.
11
Feedback
Stable systems are typically used in feedback control systems.
Unstable systems do not.
12
Noise Tolerance
Stable systems are generally more tolerant of noise.
Less tolerant of noise.
13
Stability Margin
Stable systems generally have larger stability margins.
Less stability margin.
14
Eigen Values
The eigenvalues of a stable system are generally within the unit circle.
Unstable systems are outside the unit circle.
5. Static and Dynamic System:
SR. NO.
PARAMETER
STATIC SYSTEM
DYNAMIC SYSTEM
1
Explanation
In the field of signals and systems, a static system is a system that does not change over time and is characterized by a fixed input-output relationship.
A dynamic system, on the other hand, is a system that changes over time and is characterized by a time-varying input-output relationship.
2
Input-Output Relationship
In a static system, the input-output relationship is fixed, meaning that the output of the system depends only on the current input, not on any previous inputs or the state of the system.
In a dynamic system, the input-output relationship is time-varying, meaning that the output of the system depends on the current input as well as previous inputs and the state of the system.
3
Time Invariance
Static systems are time-invariant, meaning that their behaviour does not change over time.
Dynamic systems, on the other hand, are time-varying, meaning that their behaviour changes over time.
4
Mathematical Representation
Static systems are typically represented by algebraic equations or functions.
Dynamic systems are typically represented by differential equations or functions.
5
Simplicity and Predictability
Static systems tend to be simpler and more predictable.
Dynamic systems are not much simple and predictable.
6
Stability
Static systems tend to be more stable.
Dynamic systems are not much stable as they tend to change based on various parameters.
7
Efficiency
Static systems tend to be more efficient.
Dynamic systems are not as efficient as static systems.
8
Deterministic vs Stochastic Behaviour
Static systems tend to be more deterministic, meaning that their behaviour can be more accurately predicted based on known inputs and conditions.
Dynamic systems, on the other hand, are often more stochastic, meaning that their behaviour is more influenced by chance or randomness.
9
Linear vs nonlinear behaviour
Static systems tend to be more linear, meaning that their behaviour follows a predictable pattern and can be accurately predicted based on known inputs and conditions.
Dynamic systems, on the other hand, can exhibit nonlinear behaviour, meaning that their behaviour does not follow a predictable pattern and is more influenced by external factors and randomness.
10
Time-Domain Analysis
Static systems can often be analyzed using algebraic techniques.
Dynamic systems often require the use of differential equations or other time-domain techniques to analyze their behaviour.
11
Frequency-Domain Analysis
Static systems can often be analysed using frequency-domain techniques, such as Fourier analysis or Laplace transforms.
Dynamic systems often require the use of time-domain techniques to analyse their behaviour in the frequency domain.
12
Stability Analysis
Static systems can often be analysed using stability analysis techniques, such as the Routh-Hurwitz stability criterion or the Bode stability criterion.
Dynamic systems often require the use of time-domain techniques to analyse their stability.
13
Control
Static systems are often easier to control than dynamic systems, as they are simpler and more predictable.
Dynamic systems, on the other hand, may require more advanced control techniques, such as feedback control or adaptive control, to achieve the desired behaviour.
14
Sensitivity
Static systems tend to be less sensitive to changes in their parameters or inputs.
Dynamic systems tend to be more sensitive to changes in their parameters or inputs.
15
Adaptability
Static systems are typically less adaptable.
Dynamic systems are more adaptable.
6. Time Variant and Time Invariant System:
SR. NO.
PARAMETER
TIME VARIANT SYSTEM
TIME INVARIANT SYSTEM
1
Definition
A time-variant system is a system that changes over time and the response of the system to any input signal is dependent on the time at which the input is applied.
A time-invariant system is a system that does not change over time and the response of the system to any input signal is independent of the time at which the input is applied.
2
Input-Output Relationship
The input-output relationship of a time-variant system is dependent on time.
The input-output relationship of a time-invariant system is independent of time.
3
Stability
Time variant systems may be either stable or unstable.
Time-invariant systems are generally stable.
4
Time Domain Analysis
Time-variant systems may require more complex analysis methods.
Time-invariant systems can be analyzed in the time domain using techniques such as convolution.
5
Frequency Domain Analysis
Time-variant systems may require more advanced techniques such as the Laplace transform.
Time-invariant systems can be analyzed in the frequency domain using techniques such as the Fourier transform.
6
Transfer Function
The transfer function of a time-variant system is dependent on time.
The transfer function of a time-invariant system is independent of time.
7
Impulse Response
The impulse response of a time-variant system is dependent on time.
The impulse response of a time-invariant system is independent of time.
8
Convolution
The convolution of a time-variant system is dependent on time.
The convolution of a time-invariant system is independent of time.
9
System Response
The response of a time-variant system to any input signal is dependent on the time at which the input is applied.
The response of a time-invariant system to any input signal is independent of the time at which the input is applied.
10
Time Delay
Time-variant systems may have a time delay.
Time-invariant systems do not have a time delay.
11
Memory
Time-variant systems may have memory.
Time-invariant systems do not have memory.
12
Time Constants
Time-variant systems may have time constants.
Time-invariant systems do not have time constants.
13
Dynamic Behaviour
The dynamic behavior of a time-variant system may change over time.
The dynamic behavior of a time-invariant system is constant over time.
14
Control Systems
Time-variant systems may be more challenging to use in control applications.
Time-invariant systems are commonly used in control systems.
15
Modelling
Time-variant systems are not easy to model and analyze.
Time-invariant systems are often easier to model and analyze.